近日,我院张树翠老师以第一作者身份在机械系统动力学领域国际著名期刊《Mechanism and Machine Theory》(中科院1区,TOP期刊)发表了题为“Quasi-static modeling of a cable-driven continuum manipulator considering non-smooth cable-hole friction and experimental verification”的研究论文(链接:https://doi.org/10.1016/j.mechmachtheory.2024.105856)。我院张欣刚学术副教授和姚文莉教授为共同通讯作者,青岛理工大学为第一完成单位。大连理工大学彭海军教授和北京大学刘才山教授为共同作者。研究成果得到了国家自然科学基金(12202224, 12272197, 12072170)、山东省自然科学基金(ZR2022MA06)以及青年泰山学者基金(tsqn202211180)的资助。
与深空、深地以及深海等非结构环境深度共融的绳驱连续型机器人是目前共融机器人领域研究的热点方向之一。特殊的绳索驱动方式赋予了这类机器人“机-电”分离,“刚-柔”共融,“进-退”灵巧的结构创成特色,在空间失效卫星捕获,超大尺寸空间太阳能电站在轨建造,深海环境探测,微创医疗等领域具有广泛的应用前景,但驱动绳与过线孔之间的滑动摩擦问题也造成了驱动过程的迟滞和回差,影响并限制了这类机器人的控制精度。因此,绳驱连续型机器人的绳孔迟滞问题也成为制约这类机器人进一步发展的瓶颈科学问题。
为此,论文采用多柔体系统动力学理论建立了连续型机器人的准静态动力学模型,以绳孔摩擦的“非光滑迟滞”作为研究主线,推导了绳索非光滑驱动的等效节点力,并详细推导了绳索非光滑驱动力的雅可比矩阵,实现了节点力平衡方程的快速求解。收放绳实验研究准确捕获了驱动过程的回差行为,解释了传统摩擦模型在收放绳过程中不能准确反映迟滞环演变过程的原因。随后,开展了轨迹跟踪仿真实验,研究了绳索驱动力和驱动量随轨迹跟踪点的变化规律。在此基础上,进一步探究了绳孔滑动摩擦对机器人历史构型的影响规律,为后续的多节臂连续型机器人的轨迹跟踪控制及实验提供了理论牵引。
图1 绳驱连续型机器人
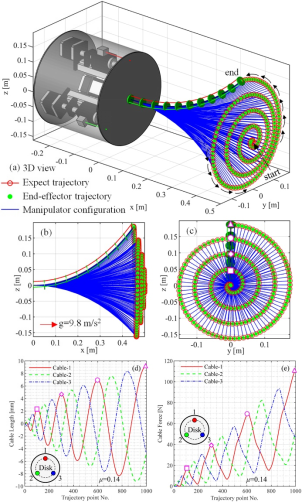

图2 绳驱连续型机器人轨迹跟踪
Mechanism and Machine Theory创刊于1970年,是IFToMM(国际机构与机器科学联合会)会刊,专注于发布机构与机器科学领域的高质量研究论文,在国际机构与机器科学领域享有盛誉。
张树翠,博士,讲师,从事基础力学教学与研究工作,致力于解决共融机器人领域的前沿基础性科学问题及关键技术,旨在通过基础理论研究推动深空、深地以及深海等非结构环境共融机器人的创新发展。近年来在Mechanism and Machine Theory、振动与冲击等国际、国内期刊发表系列学术论文。获得2024年度知网高影响力学者称号,山东省高校青年教师教学比赛二等奖,山东省普通高等学校教师教学创新大赛一等奖,全国基础力学青年教师讲课比赛二等奖。(撰稿:张欣刚、缪玉松;审核:邱田会)
